Mobilny Robot Inspekcyjny zaczynał jako projekt studencki kierowany przez 4 inżynierów z Politechniki Wrocławskiej i Politechniki Opolskiej. Konstruktorzy (Tomasz Zimoch, Krzysztof Taraszkiewiecz, Dawid Lukosek, Eliasz Kubala) rozpoczęli pracę nad swoim pierwszym pojazdem do inspekcji sieci kanalizacyjnych pod koniec 2014 r. Na początku 2016 roku powstał pierwszy w pełni funkcjonalny prototyp MRI przeznaczony do inspekcji sieci o średnicach od 160 mm.
 Obudowa pojazdu wykonana została z lekkiego i wytrzymałego stopu aluminium. W robocie ponadto zastosowano m.in. odpowiednio dobrany system przekładni, silnik DC, zestaw czujników pozwalający na pomiar temperatury, wilgotności, ciśnienia oraz pomiar spadków z dokładnością do 0,20. W pełni wodoszczelny zestaw, w specjalnie zaprojektowanym sześcioczęściowym korpusie i siedmioczęściowej obrotowej głowicy, wyposażony został w moduł kamery Sony FullHD (1080p) o dużej czułości (od 0,01 Lux) z funkcją zoom i autofocus.
Obudowa pojazdu wykonana została z lekkiego i wytrzymałego stopu aluminium. W robocie ponadto zastosowano m.in. odpowiednio dobrany system przekładni, silnik DC, zestaw czujników pozwalający na pomiar temperatury, wilgotności, ciśnienia oraz pomiar spadków z dokładnością do 0,20. W pełni wodoszczelny zestaw, w specjalnie zaprojektowanym sześcioczęściowym korpusie i siedmioczęściowej obrotowej głowicy, wyposażony został w moduł kamery Sony FullHD (1080p) o dużej czułości (od 0,01 Lux) z funkcją zoom i autofocus.
 Robot może być sterowany przy pomocy klawiatury komputera lub aplikacji mobilnej umożliwiającej pracę bez konieczności przebywania przy jednostce centralnej! Zarówno sterowanie robotem, jak i przeprowadzanie inspekcji odbywa się przy pomocy specjalnie przygotowanego oprogramowania zgodnego z obecnie obowiązującymi normami.
Robot może być sterowany przy pomocy klawiatury komputera lub aplikacji mobilnej umożliwiającej pracę bez konieczności przebywania przy jednostce centralnej! Zarówno sterowanie robotem, jak i przeprowadzanie inspekcji odbywa się przy pomocy specjalnie przygotowanego oprogramowania zgodnego z obecnie obowiązującymi normami.
Konstruktorzy postawili przed sobą jeden cel: „Stworzenie profesjonalnego i niedrogiego urządzenia, które może być stosowane na szeroką skalę przez przedsiębiorców w całej Polsce”. Każda z osób zaangażowanych w projekcie Mobilnego Robota Inspekcyjnego specjalizuje się w określonej dziedzinie, a połączenie ich umiejętności daje ogromne możliwości.
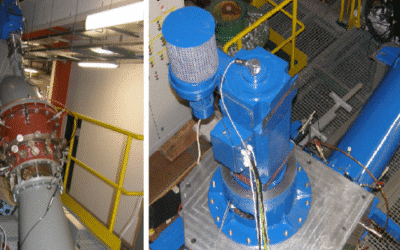
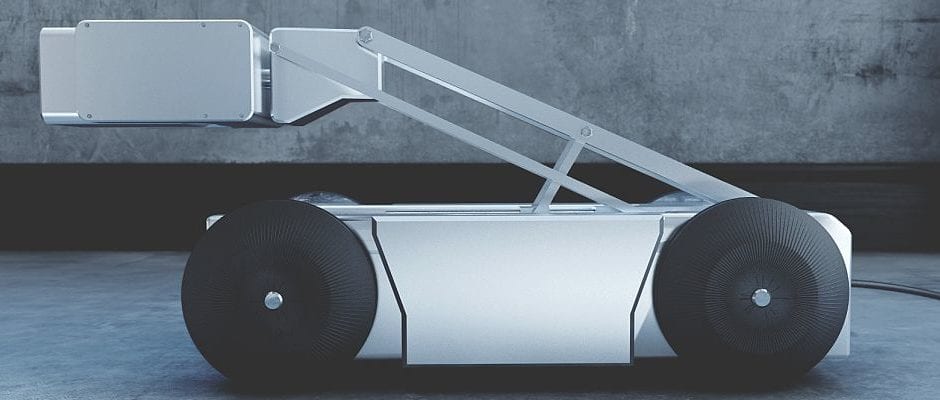
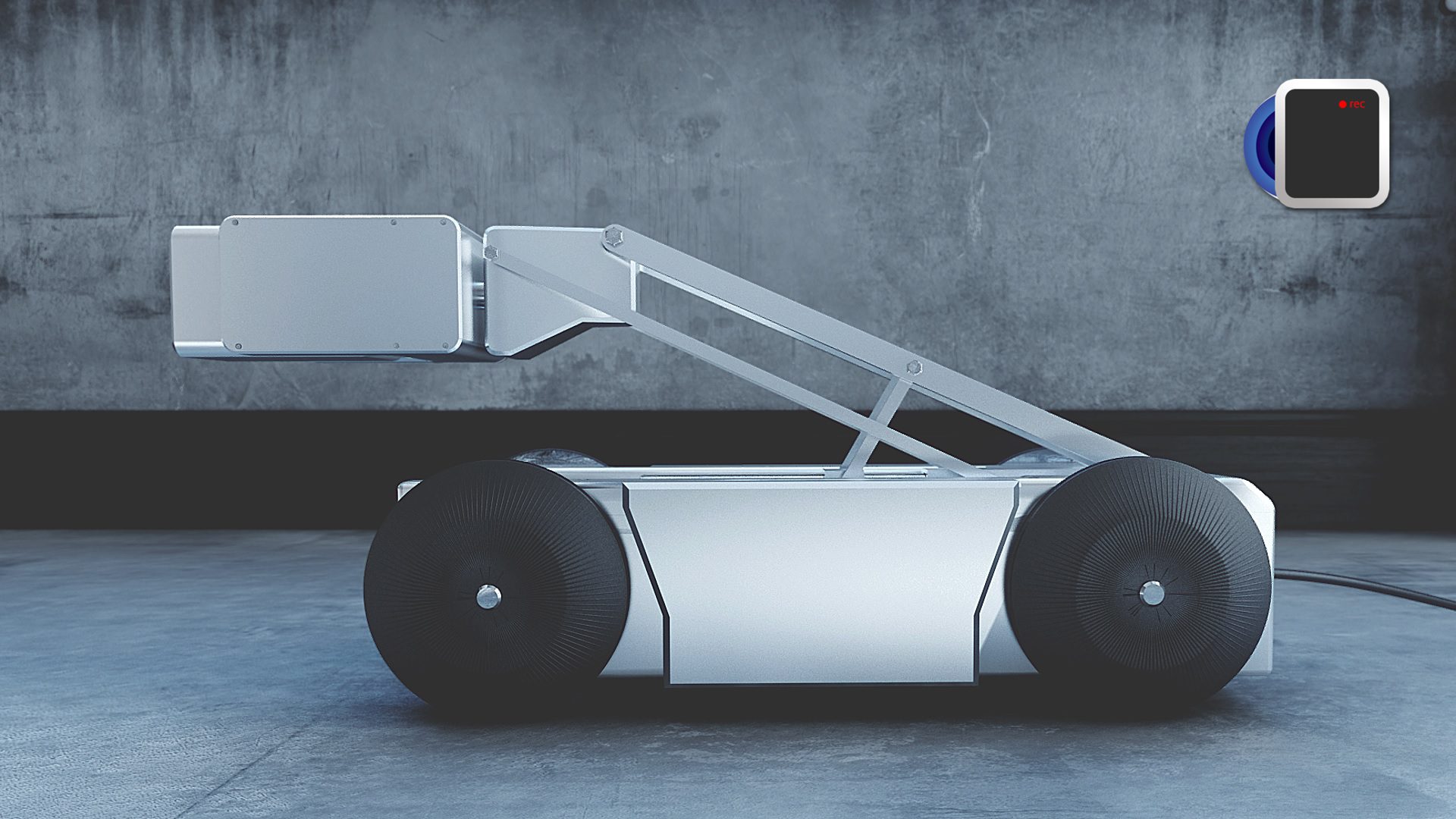 Obecnie konstruktorzy, już w stopniu magistrów, ukończyli swoją przygodę z uczelnią i kontynuują pracę nad udoskonaloną wersją urządzenia. MRIv2 wyposażona jest między innymi w automatyczny podnośnik (pantograf), pozwalający na inspekcje rozszerzonego zakresu średnic kanalizacji, dwa silniki wysokiej mocy oraz udoskonalony system przekładni. Dzięki temu MRIv2 uzyskała możliwość korygowania kierunku jazdy. Ponadto duży nacisk położono na w pełni modułową, mosiężną konstrukcję z wymienną głowicą. Udoskonaleniu uległo również w pełni autorskie oprogramowanie.
Obecnie konstruktorzy, już w stopniu magistrów, ukończyli swoją przygodę z uczelnią i kontynuują pracę nad udoskonaloną wersją urządzenia. MRIv2 wyposażona jest między innymi w automatyczny podnośnik (pantograf), pozwalający na inspekcje rozszerzonego zakresu średnic kanalizacji, dwa silniki wysokiej mocy oraz udoskonalony system przekładni. Dzięki temu MRIv2 uzyskała możliwość korygowania kierunku jazdy. Ponadto duży nacisk położono na w pełni modułową, mosiężną konstrukcję z wymienną głowicą. Udoskonaleniu uległo również w pełni autorskie oprogramowanie.
 Dzięki implementacji rozwiązań, które daje nowoczesna technologia, w MRIv2 zdalny podgląd
Dzięki implementacji rozwiązań, które daje nowoczesna technologia, w MRIv2 zdalny podgląd
inspekcji z dowolnego miejsca na świecie jest możliwy przy pomocy komputera lub telefonu z dostępem do Internetu. Oprócz tej aplikacji przygotowana została również ulepszona aplikacja dla operatora, dzięki której sterowanie robotem jest możliwe nie tylko z laptopa czy komputera, ale również przy pomocy tabletu.
Projekt Mobilnego Robota Inspekcyjnego został wyróżniony podczas uroczystej Gali Targów WOD-KAN.
Wszelkie dodatkowe informacje można uzyskać na stronie internetowej MRI: www.mobirobi.pl